기사상세페이지
로봇산업 핵심기술, 로봇모듈화 국제표준개발 한국이 주도
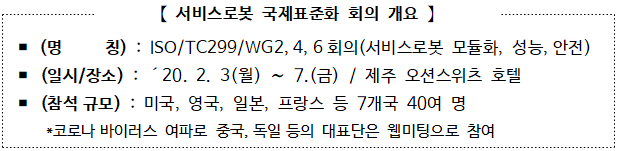
- 국표원 서비스로봇 국제표준화회의 개최, 국제표준 개발 주도 -
□ 로봇 산업을 활성화하기 위해 레고 블록처럼 로봇을 구성하는 부분을 표준화하는 로봇 모듈화(Modularity) 분야의 국제표준 개발을 우리나라가 주도한다.
ㅇ 산업통상자원부 국가기술표준원(원장 이승우)은 2월 3일부터 7일까지 제주에서 열린「서비스로봇 국제표준화회의」에서 우리나라(강원대 박홍성교수)가 제안한 ‘서비스로봇 모듈화 일반요구사항’에 대한 국제표준안이 표준승인(FDIS)*을 위한 절차를 성공적으로 마쳤다고 밝혔다. 동 표준안은 회원국에 최종 회람후 국제표준으로 등록될 전망이다.
<출처 : 산업통상자원부>
<서비스로봇 모듈화 표준 관련>
□ 이 국제표준안은 로봇시스템 구성 요소 가운데 기능적으로 독립성을 가지면서 부분개발·교체·재활용이 가능한 ‘로봇 모듈’을 정의하는 표준으로, 제조사 간 호환성, 로봇개발의 경제성과 직결되는 핵심 기술이다.
ㅇ 서비스로봇 모듈화 표준이 우리주도로 국제표준화되면, 모듈 형태로 호환성이 확보된 로봇 부분품을 생산․유통할 수 있게 되어, 우리 중소․중견기업들이 보다 쉽게 로봇시장에 진입할 수 있고 다양한 서비스로봇의 신제품 개발이 촉진될 수 있을 것으로 기대된다.
ㅇ 강원대학교 전기전자공학과 박홍성 교수가 ‘17년 2월 국제표준화기구(ISO)에 신규 국제표준안으로 제안해, 지난 3년간 논의를 이어왔다.
ㅇ 이 표준안은 오는 6월께 국제표준 제정절차의 최종 관문인 표준승인(FDIS) 단계를 거쳐 금년중 국제표준으로 제정될 예정이다.
□ 또한, 우리나라는 이번 회의에서 이 국제표준안의 후속 표준 2종을 신규 국제표준 작업과제(NP, New Proposal)로 제안하기 위한 세부 내용 협의를 함께 진행함으로써, 서비스로봇 모듈화 분야 국제표준 선점 기반을 마련했다.
ㅇ ‘➊서비스로봇의 모듈간 인터페이스’, ‘➋소프트웨어인터페이스 공통 정보’를 규정하는 2종의 국제표준안을 각각 오는 5월과 11월에 신규 작업과제로 제안할 예정이다.
<서비스로봇 성능및안전 표준화 관련>
□ 뿐만 아니라, 우리나라(세종대 문승빈 교수)는 ‘서비스로봇 주행성능 국제표준(ISO18646-2)’에 ‘경로정확도’ 등 성능항목을 추가하여 금년 10월에 개정안을 제안하기로 하여 주행성능 국제표준 개정도 우리나라 주도로 개발할 수 있게 되었다.
ㅇ 아울러 서비스로봇 안전 표준화 분야에서는 국내기업(LG전자)이 중심이 되어 ‘개인지원로봇의 안전요구사항 국제표준(ISO 13482)’에 ‘국내 산업계에 불리하게 작용할 수 있는 과도한 안전요구사항’을 개선할 수 있는 개정 항목을 제안하는 활동에 주력하였다.
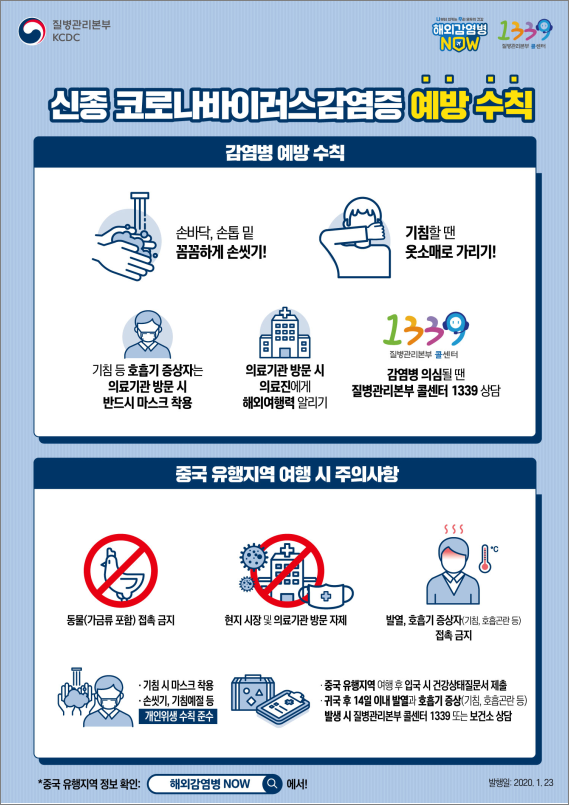
<코로나바이러스 관련 회의진행 사항>
□ 금번 회의는 코로나바이러스 여파로 중국(7명), 독일(4명) 대표단이 모두 불참하는 등 20여명의 전문가가 참석하지 못했으나, 국제표준화기구(ISO)의 회의개최 지침에 따라 불참 전문가들은 웹미팅 방식으로 회의에 참여하여 회의진행에 큰 지장없이 회의를 마칠 수 있게 되었다.
ㅇ 또한, 산업통상자원부의 ‘코로나바이러스 대응 통합 행동요령’의 회의개최 지침에 따라, 회의장에 손소독제, 체온계 비치 등 철저한 예방 관리 하에 회의를 진행하였다.
□ 이승우 국가기술표준원장은 “이번 회의를 통해 고기능의 로봇을 쉽게 개발할 수 있도록 해주는 로봇 산업의 핵심기술인 모듈화 분야의 국제표준을 우리나라가 선점할 수 있는 확고한 기반을 마련했다”면서,
ㅇ “지능형로봇 표준화 전략 로드맵을 수립해 혁신 성장산업인 로봇 산업의 국제표준화를 주도해 나갈 것”이라고 말했다.
[붙 임] 서비스로봇 모듈 활용의 예
ㅇ 기계적·전기적으로 모듈화된 모듈러 로봇은 다음과 같이 다양한 조합을 이룰 수 있다. 제어기가 이동부와 로봇 팔 내부에 포함되어 개별적인 제어가 가능하다.
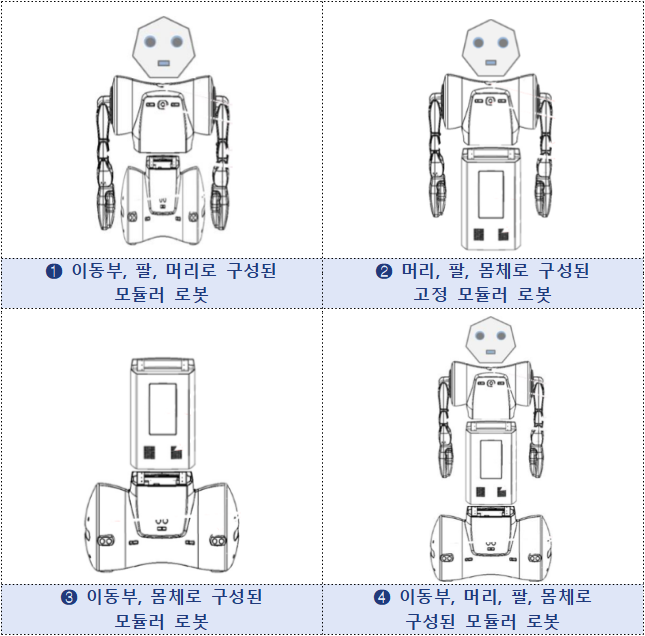
<출처 : 지능형로봇표준포럼 표준 (KOROS 1106-1)>
게시물 댓글 0개